

雍吉 PC-Based 運動控制卡
UNI-6P-V1
UNI-6P-V1
frontend.content
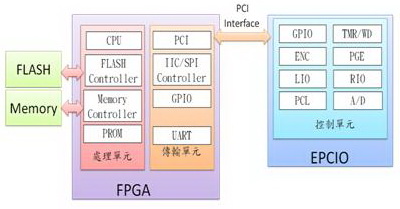
雍吉科技所開發的UMCS(Unitive Motion Control Systemt)內建FPGA與運動控制專用IC,除了可滿足一般產業機械需求外,另可依使用者需求彈性擴充及修改功能。UMCS在脈波控制下,會採DDA (Digital Differential Analyzer)方式均勻送出各軸移動量,實現六軸伺服馬達或步進馬達運動控制。UMCS還內建有閉迴路控制器,可送出正負十伏特電壓命令驅動速度型伺服驅動器;且各軸皆有一組的控制輸入點,包括了Home點、上行程極限點及下行程極限點,另外尚有禁制信號輸出點、Position Ready輸出點及Emergency Stop輸入點;此外可外接遠端輸出入控制子版,最大可擴充至128個輸入點及128個輸出點。
規格
● FPGA:
【XC3SD1800A-4CSG484C】或【XC3SD3400A-4CSG484C(換購)】
● PCI 介面
● UART 16550 x 1
● GPIO : 32IO/32I
● Flash (4 Mbytes)
● DDR2 Memory (128M bytes DDR2 SDRAM)
● 6軸編碼器輸入(6-axes optical encoder input)
● 6組16-bit D/A轉換器(6 channel-16 bits digital to analog convertor)
● 6軸伺服控制 (6-axes servo control)
● 19點專用輸入及7點專用輸出 (19 special purpose input and 7 special purpose output)
* Home Sensor Signal Input:6
* Positive Over Travel Signal Input:6
* Negative Over Travel Signal Input:6
* Inhibit Signal Output:6
* Emergency Stop Input:1
* Position Ready Output:1
● 256點遠端串列傳輸輸出入點介面
* Remote IO:128 IN/128OUT Maximum
應用
● 機械手臂(Robot ARM)應用
● 多軸自動化機台應用
● SOC運動控制發展平台
● 輸出輸入控制